Twodphysics
Rigid Bodies Supported : STATIC, DYNAMIC, KINEMATIC
Constraints Supported : Pin Joint, Slide Joint, Pivot Joint, Groove Joint, Damped Spring, Damped Rotary Spring, Rotary Limit Joint, Ratchet Joint, Gear Joint, Simple Motor
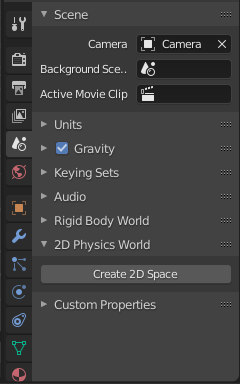
2D Physics Settings is under Scene Tab
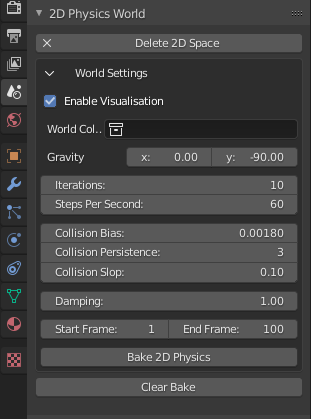
2D World Settings
Enable Visualisation : Show collision shapes for the selected object.
World Collection : The collection containing world objects.
Gravity : Global gravity applied to the space.
Iterations : Iterations allow you to control the accuracy of the solver.
Steps per second : No of steps to simulate in a second, higher is better but slower.
Collision Bias : Determines how fast overlapping shapes are pushed apart. To improve stability, set this as high as you can without noticeable overlapping.
Collision Persistence : The number of frames the space keeps collision solutions around for. Helps prevent jittering contacts from getting worse. This defaults to 3.
Collision Slop : Amount of overlap between shapes that is allowed.
Damping : Amount of simple damping to apply to the space.
Start Frame : Start frame of simulation.
End Frame : End frame of simulation.
Bake Physics : Bake physics to keyframes.
Clear Bake : Clear baked keyframes.
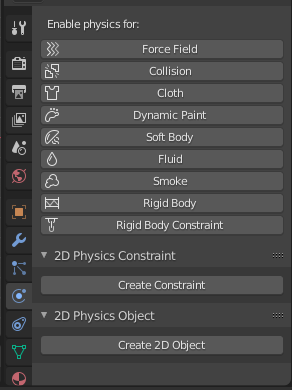
Rigid Body settings is located in Physics Tab
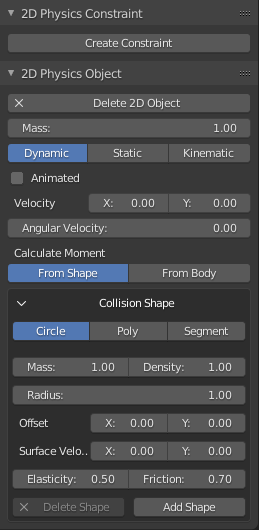
2D Physics Object Settings
Mass : Mass of the shape
Moment of Inertia : Moment of inertia of the body.
Animated : Rigidbody is animated. i.e. take locations from the animation.
Velocity : The velocity of the body.
Angular Velocity: The angular velocity of the body in radians per second.
Calculate moment : From Shape will calculate the moment from all the shapes. From Body will calculate it manually from the values given.
Collision Shape : Circle, Poly, Segment (Line)
Density : The density of this shape.
Elasticity : Elasticity of the shape.
Start Point : The first endpoint of the segment.
End Point : The second endpoint of the segment.
Friction : Friction coefficient.
Surface Velocity : The surface velocity of the object. This value is only used when calculating friction, not resolving the collision.
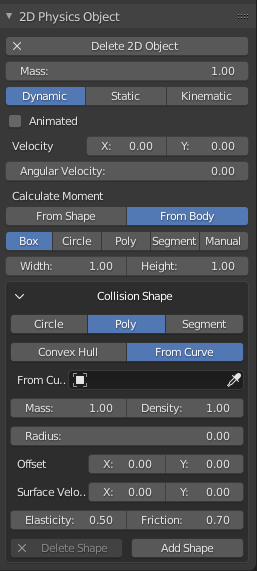
Poly Shape
Shape from Curve : Get collision shape from curve.
Convex Hull : Calculate the collision shape from convex hull.
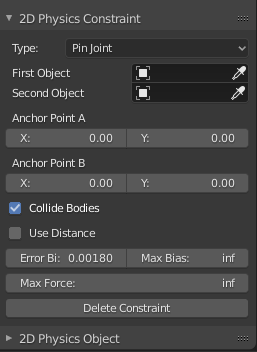
2D Physics Constraint
Type : Constraint Type.
First Object : The first of the two bodies constrained
Second Object : The second of the two bodies constrained
Anchor Point : Anchor Points on objects.
Collide Bodies : Ignores the collisions if this property is set to False on any constraint that connects the two bodies.
Error Bias : The percentage of joint error that remains unfixed after a second.
Max Bias : The maximum speed at which the constraint can apply error correction.
Max Force : The maximum force that the constraint can use to act on the two bodies.
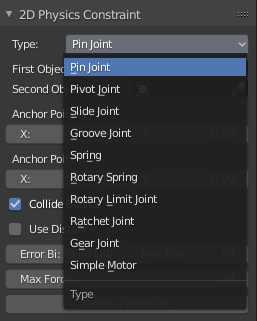
Constraint Types
World Settings
Basic Scene Setup
Multiple Rigid Body Worlds
Rigid Body Settings